山形大学大学院理工学研究科機械工学専攻南後研究室ではリンク機構の設計とその応用を専門としています。
In Nango laboratory, Yamagata University, we are reserching about the design
and applications of linkage mechanism.
TEL. 0238-26-3235
〒992-8510 山形県米沢市城南4-3-16
マニピュレータ用手首・肘関節機構Wrist and Elbow Joint
概要
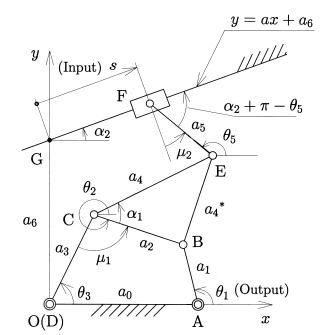
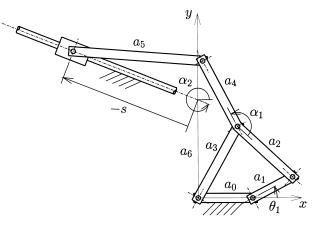
動力源を本体付近に配置して,可動部の軽量化を図ったマニピュレータです.動力源から各関節への運動の伝達には平面リンク機構を用いています.入力となるスライダ変位と出力となる関節での角変位の間に線形関係が成り立つよう,リンク長等の設計パラメータを決めています.モータの回転でボールねじを介してスライダ変位を与える場合には,モータの角度に比例した関節角度が得られます.設計
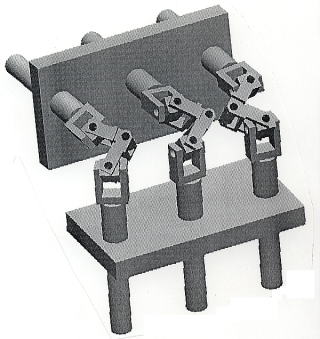
肘関節では,空間7Rリンク等速継手を配置して,回転運動を伝達しています.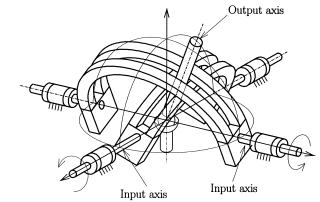
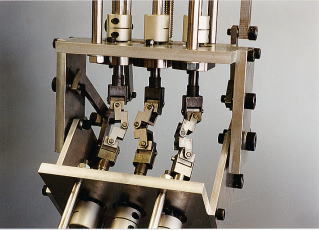
試作
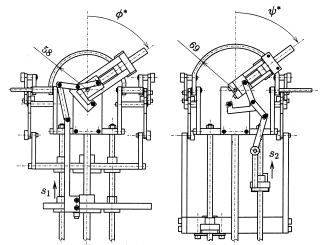
スライダと手首関節の入出力関係を調べる実験装置を製作しました.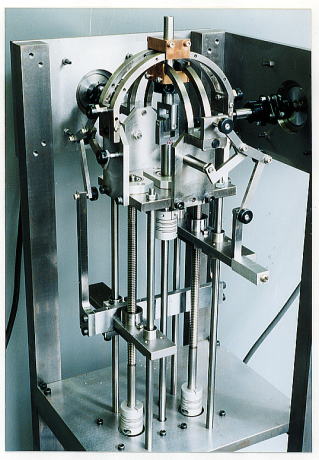
バナースペース
山形大学大学院理工学研究科機械工学専攻南後研究室
〒992-8510
山形県米沢市城南4-3-16
TEL 0238-26-3235
FAX 0238-26-3235